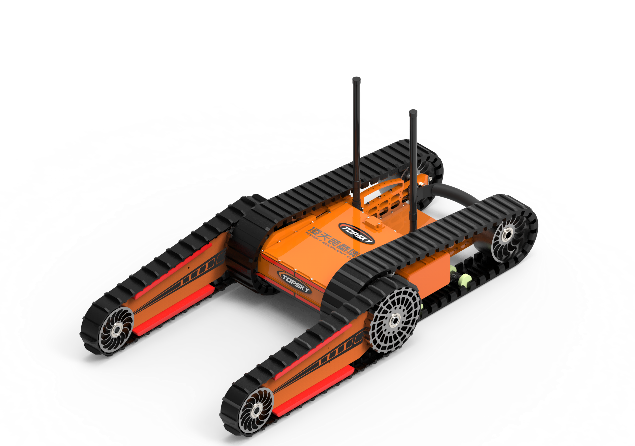
RXR-C10D Мал робот за извидување на пожари


| Роботите за извидување на пожар главно се користат за замена на вештачки приближувачки запаливи, експлозивни, сложени и други сурови средини за извидување на животната средина и откривање на гас. Тие исто така можат да се користат за извидување во мали и ниски простори како што се дното на каросеријата на автомобилот и дното на полицата. Шасијата има структура со двојна нишалка со ползење и предна рачка, која може да премине вертикални пречки од најмногу 280 mm и може да се искачи на платформа од 360 mm, што може да се прилагоди на различни терени за брзо борбено распоредување. Мултифункционалниот интерфејс за проширување може да биде опремен со различни модули на каросеријата. Во исто време, роботот е опремен со жична контрола, која може да работи далечински преку жична врска под услов на пречки на сигналот. Двојните нишалки на роботот можат слободно да се расклопат, што може да се користи во повеќе сценарија. |
| 2.Карактеристики |
| 1. Паметен далечински управувач, копче за проширување со повеќе функции Визуелизирано работење на голем екран 2. Модуларизација на целата машина Модуларизација на шасија, модулација на батерија, модулација на суспензија 3. Одлични перформанси при искачување, качување по скали, преминување пречки и преминување ровови Може да се искачува на падини од 45 степени Може да се искачува по скали под агол од 40 степени Може да се искачи на вертикални пречки од 28 см Може да се протега низ ровови широки 41 см 4. Видео систем Режим на комуникација со 3 точки, за решавање на нормални операции во невизуелна средина, растојание на комуникација 1 км 2-канална HD камера 5. Повеќе модули за проширување Лидар модул, модул за детекција на гас, извидувачки кардански модул, модул за роботска рака
Четири продолжени порти за авијациски приклучок, резервирани RS232, RS485, CAN, мрежен порт, 24V, 12V (нормално затворен)
|
| 3.Ттехнички параметри3.1 Целиот робот: 1. Име: Мал робот за извидување на пожари RXR-C10D (B) 2. Модел: RXR-C10D 3. Основна функција: функција за видео извидување 4. Ниво на заштита: нивото на заштита на целиот робот е IP67 5. Напојување: електрична, тројна литиумска батерија 6. Големина: ≤ должина 610mm × ширина 490mm × висина 200mm (без антена) 7. Дијаметар на вртење: ротирање на место 8. Тежина: ≤25 кг 9. Максимална линеарна брзина: ≥2.7m/s, беспрекорна брзина на далечинско управување 10. Износ на директно отстапување: ≤5% 11. Способност за искачување: ≥45° 12. Способност за искачување: ≥40° 13. Висина на препреки за премин: ≥280 mm 14. Континуирано време на одење: ≥2 часа 15. Растојание на безжичен далечински управувач: 500 м (отворено) 16. Растојание за безжичен видео пренос: 500 м (отворена) комуникација со две точки; 800 м (отворена) комуникација со три точки за да се задоволи сцената на оклузија (опционално); 17. Растојание на жичен далечински управувач: 100 метри 18. Растојание на пренос на видео преку жица: 100 метри 19. Робот ползач: Роботот ползач треба да биде направен од пламен-отпорна, антистатичка и гума отпорна на високи температури, со кевлар внатре, со дизајн за заштита од паѓање од шини.
3.2 Перцепција на видео од страна на роботот: 1. Број и конфигурација на камери: Двете камери со висока дефиниција на телото можат да се гледаат и контролираат истовремено, а околината околу местото на настанот може стабилно да се прикаже на далечинскиот управувач, што може да го задоволи безжичното управување на роботот и значително да ја подобри ефикасноста на борбата. 3.3 Параметри за конфигурација на терминалот за далечинско управување 1. Димензии: 362*188*40 (без висината на клацкалката) 2. Тежина на целата машина: 2,5 кг 3. Екран: LCD екран со висока осветленост од најмалку 10 инчи, 4 канали за префрлување на видео сигнал 4. Платформа на контролниот систем: оперативен систем window10 5. Работно време: 2 часа (континуирано) 6. Основни функции: Далечинскиот управувач и мониторот се интегрирани и преносливи, што може да се гледа и контролира истовремено, а околината околу местото на настанот може стабилно да му се претстави на далечинскиот оператор. (Опционална функција) Прикажување во реално време на каросеријата на возилото и на батеријата на кутијата за далечинско управување, растојанието за пешачење и други информации, а може да ги контролира движењата на роботот напред, назад и управувањето. Методот за пренос на податоци е безжичен пренос со употреба на шифриран сигнал. 7. Функција за снимање и репродукција на видео: видеото може да се снима во секое време, а снимената видео содржина може автоматски да се зачува, а видеото може да се репродуцира директно на терминалот за далечинско управување или видеото може да се копира на други уреди 8. Функција за контрола на одење: Да, 1 џојстик го реализира флексибилното работење на роботот напред, назад, свртување лево и свртување десно 9. Видео прекинувач: Да, саморесетирачки џог прекинувач 10. Функција за контрола на осветлувањето: Да, прекинувач за префрлување
4.4 Друго: 100 метри жичен комуникациски калем Должина: 100 мм |
| 4.Конфигурација на производот |
| 1. Мал робот за извидување на пожар RXR-C10D (B) 1 сет 2. Кутија за далечинско управување (вклучувајќи батерија) 1 сет 3. Полнач за далечински управувач (12.6V) 1 парче 4. Полнач за тело на робот (25.2V) 1 1 парчиња 5. 4 парчиња антена за пренос на слика од 1,4 GHz 6. Жична комуникација 100 метри калем 1 парче 7. Помошни алатки 1 сет |